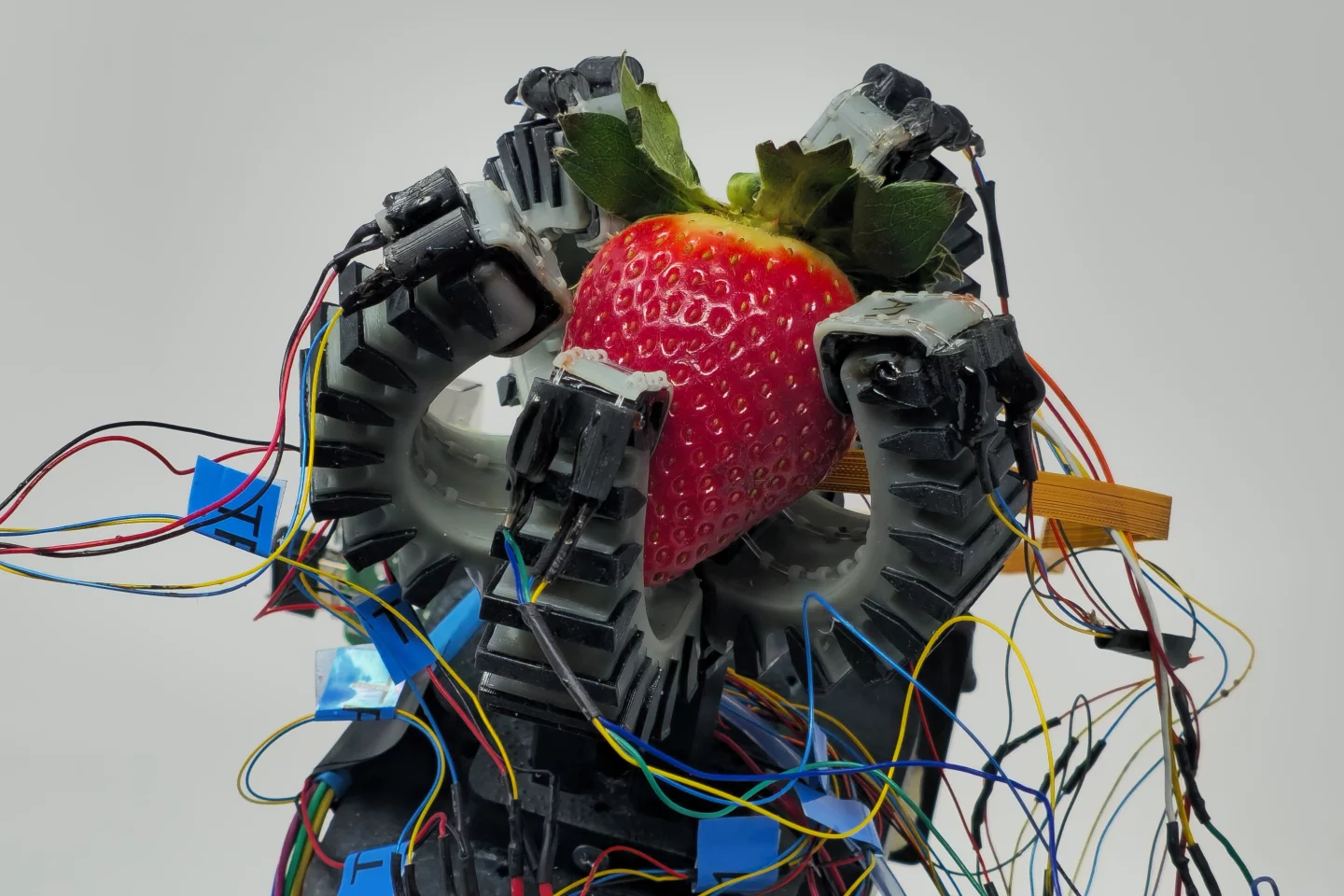
A research team at West Virginia University in the United States recently developed a soft but powerful soft robot hand that can not only gently pick fragile fruits and vegetables such as strawberries, but also comprehensively judge ripeness through touch and vision during the picking process, which is expected to significantly reduce labor costs and waste rates in the picking process.
According to reports, agriculture is becoming one of the industries increasingly affected by robotic technology. Farmers in many regions around the world are facing the dual pressure of labor shortages and rising labor costs. In some crops, manual picking costs are even close to half of the total production costs. For fruits and vegetables with extremely short picking windows and easy to be bruised, such as strawberries, raspberries, and avocados, it is often difficult to balance efficiency and loss with traditional manual or rigid mechanical picking. As a result, farmers may lose up to a quarter of their yield.
The "Robiotics Lab" team at West Virginia University has been working on developing robots that imitate the movement of animals. The soft robot hand launched this time is not the metal "mechanical claw" that people think of. Instead, it draws inspiration from the anatomy of starfish and uses silicone and polyurethane materials to make soft fingers. At the same time, the overall shape still maintains a five-finger layout similar to that of a human hand, so that it can pick up and hold fruits more naturally.
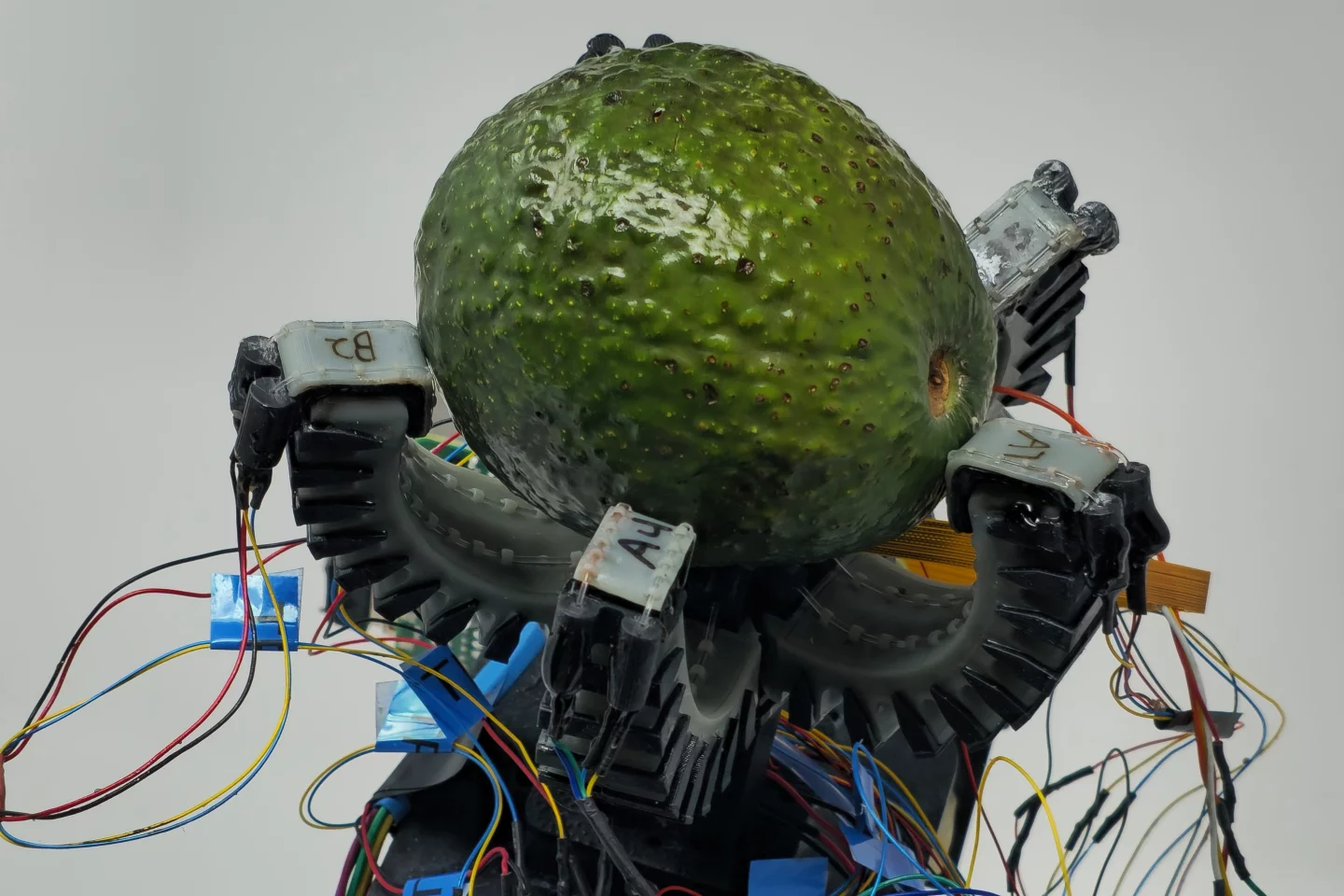
In terms of perception capabilities, this new robot hand is equipped with a miniature camera for visual judgment of the appearance of fruits. This function has been applied to some agricultural robots. However, the researchers pointed out that relying solely on appearance is not enough to accurately judge ripeness. Taking avocados as an example, their ripeness often needs to be sensed through gentle pinching. How to let the robot learn this "human intuitive" judgment is one of the key difficulties in this research.
To solve this problem, the research team embedded special tactile sensors inside the soft fingers, so that when the robot gently squeezes the fruit, it can obtain physical information about the hardness and elasticity without crushing the fruit. These sensors can also monitor the holding strength in real time. When the system determines that the current grip is not firm enough, the robot will automatically fine-tune the force to prevent the fruit from slipping or falling to the ground.
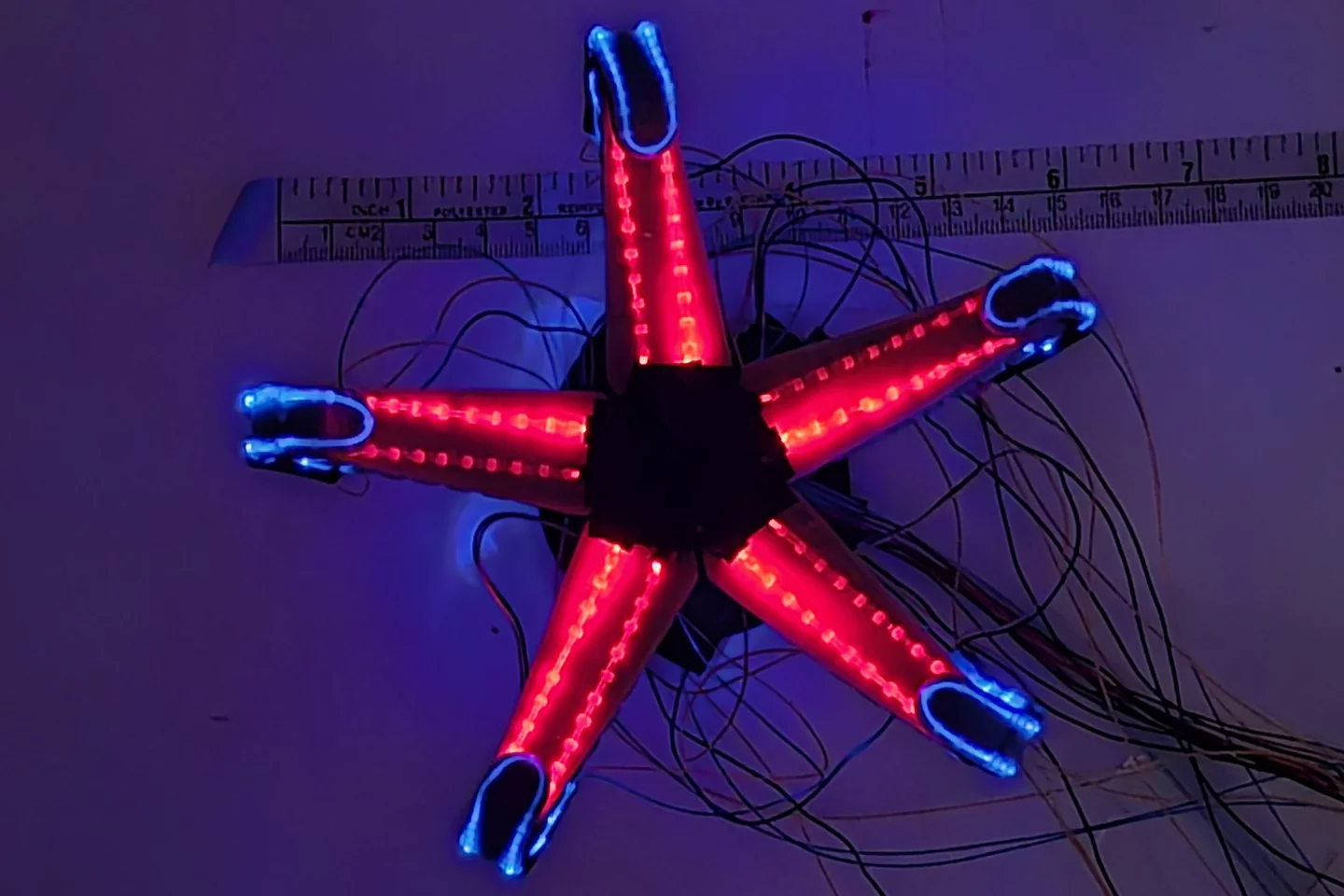
During the testing phase, the robot hand demonstrated high perception and control accuracy, and the sensor could predict the shape of the grabbed fruit with almost 100% accuracy. The current prototype device weighs less than 65 grams, takes less than two seconds to open and close once, and can lift a maximum object of about 1 kilogram, providing the basic conditions for lightweight and response speed for actual agricultural machinery integration.
Project leader Anand Mishra, assistant professor in the Department of Mechanical, Materials and Aerospace Engineering, said the team plans to bring this software grasping technology to the global market in the next two to four years, and is working on developing a more scalable grasping device to meet the needs of large-scale deployment in the field. Researchers are also optimistic about the application prospects of this technology in a wider range of scenarios, including the grabbing of strange objects in space missions, underwater environment exploration, and the safe operation of fragile tissues and organs in the medical care field.

Relevant research papers have been published in the journal "Nature Communications", showing that robot grasping solutions that combine software structures, optical fiber sensing and vision systems are becoming an important technical path for high-loss, high-precision scenarios. The researchers pointed out that as such soft robots gradually move towards commercialization, the ratio of human pressure and fruit and vegetable waste on the farm picking front line is expected to be significantly improved, providing a new tool foundation for the development of precision agriculture and intelligent agricultural machinery.