We've seen many different robotic water striders over the years, but scientists are still discovering new ingenuities about this insect and replicating them. For example, recently, researchers invented a water strider robot that can move quickly across the water using fans on its feet.

At just 3 millimeters long, the Rhagovelia water strider is truly special. Their two long mid-legs (used for propulsion) end in feathery appendages that unfold when they hit the water. As they paddle forward, these underwater appendages lift up the water's surface like the webs between frog's toes, propelling the insect forward quickly.
At the end of the stroke, the fan-shaped tentacles are pulled out of the water, and the wet tentacles gather into a point—a bit like the bristles of a freshly soaked paintbrush. This gives the tentacles a more streamlined shape as the legs swing forward in preparation for the next stroke.

A fanned Rhagovelia water strider - in this photo, its fan and talons are pointed downward, reflected in the water like a mirror
These fan-shaped structures allow the insects to move quickly across the water at a speed of about 120 body lengths per second. What's more, by simply deploying a water-absorbing fan-shaped structure on one side of the water surface, the water strider can complete a 90-degree turn in about 50 milliseconds.
Based on this idea, scientists from the University of California, Berkeley, Ajou University in South Korea, and the Georgia Institute of Technology decided to study Rhagovelia in more depth.
Using electron microscopy, Ajou University Professor Je-Sung Koh and postdoctoral researcher Dongjin Kim discovered that each fan-shaped individual filament consists of a flat, flexible, ribbon-like central strip with smaller barbules branching out on either side—really like a feather. This design allows the fan-shaped appendage to unfold underwater so it can be used like a paddle.
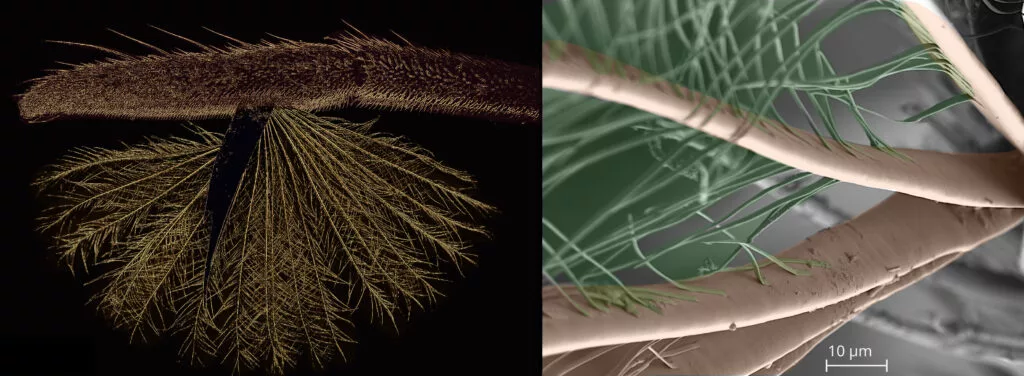
On the left is a photograph of the fans and claws at the ends of the two paddling legs of Rhagovelia, and on the right is a color scanning electron microscopy image of the fan showing the fan's barbules and the flat ribbon-like microstructure of the smaller barbules (green) that make up the fan.
The scientists also discovered that the surface tension of water provides all the elastic force needed to make these threads unfold. It had previously been thought that this unfolding action was driven by muscles. During the stroke, a small amount of muscle force is used to keep these threads under tension, but no muscle force is required to spread them.
Based on these findings, the team created a robotic version of the insect called Rhagobot. It's certainly larger than its namesake, measuring 8cm long, 10cm wide and 1.5cm high (3.1 x 3.9 x 0.6 inches). At the end of each of its two middle legs is a 1-milligram Rhagovelia-like fan-shaped structure with flat ribbon-like microstructures measuring 10 x 5 millimeters.

The semi-aquatic robot Rhagobot (left) is next to a close-up of its bionic fan, which turns on when exposed to water
The entire robot is hardwired to an external power source and weighs just one-fifth of a gram. Currently, it can move quickly across the water at a distance of two body lengths per second and complete a 90-degree turn in less than half a second. It is hoped that descendants of Rhagobot will be faster and more flexible for applications such as search and rescue or environmental monitoring.
"Our robotic fans are able to self-deform using only water force forces and flexible geometry, just like their biological counterparts," said Gao, senior co-author of the study with Georgia Tech Professor Saad Bumrah. "This is a kind of mechanical embedded intelligence that has been refined by nature after millions of years of evolution. In the field of small robots, this efficient and unique mechanism will become a key technology to break through the limitations of traditional robot miniaturization."
The research was led by Ortega-Jiménez, an assistant professor at the University of California, Berkeley, and his paper was recently published in the journal Science. You can see Rhagobot in action in the video below.
Source: University of California, Berkeley, Georgia Institute of Technology