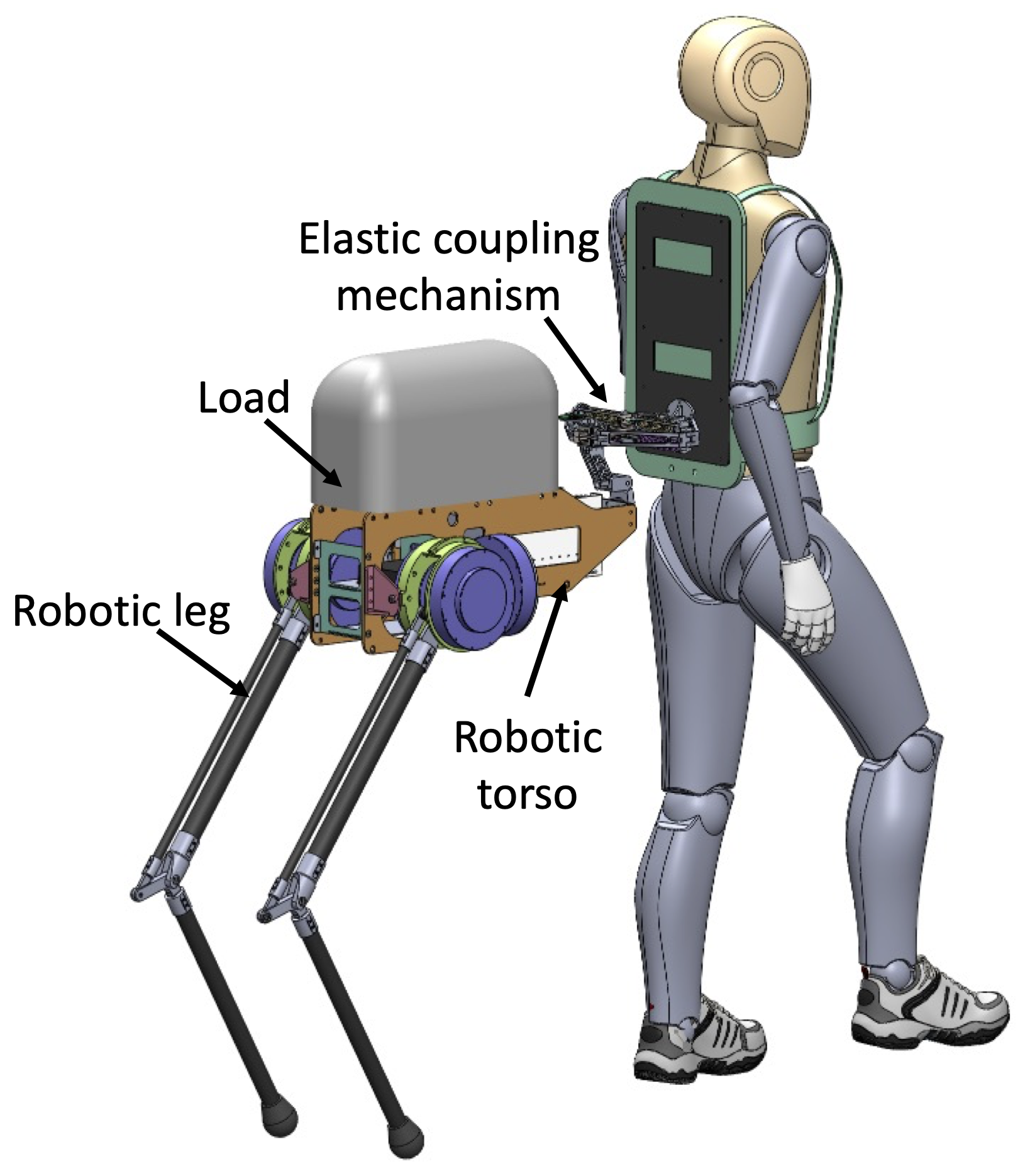
The team of Professor Fu Chenglong of Southern University of Science and Technology originally developed a wearable centaur weight-bearing walking robot. The relevant results have been published in authoritative journals in the field of robotics. Traditional exoskeleton robots have low assist efficiency and can only reduce the human metabolic rate by about 10%.The centaur robot breaks the traditional design and draws inspiration from the load-bearing form of quadrupeds. As independent limbs, it is connected to the human back through a wearable elastic coupling interface to build a human-machine hybrid quadruped system.
The robot is equipped with a softened elastic coupling mechanism, which has nonlinear stiffness characteristics and realizes dynamic decoupling of power assistance and balance; combined with the walking-interaction collaborative control framework,It can sense the human body's movement intention in real time, follow it in all directions with high precision without manual instructions, and output stable horizontal thrust at the same time.
Experimental verification shows that the robot has excellent performance. In terms of maneuverability, it can complete the "8" figure circle around the pile in a narrow space of 1 meter, and smoothly pass through complex road surfaces such as steps and slopes.
In terms of weight-bearing performance,When carrying a 20kg weight, the net metabolic cost of the human body is reduced by 35%, and the pressure on the soles of the feet is reduced by 52%., there is no significant difference between stability and zero-load walking.
This robot is suitable for emergency rescue, field exploration, complex terrain logistics support and other scenarios, and is expected to break through the physiological limits of the human body in the future.