Even if the world's most advanced insect micro air vehicle (MAV) is built, it will ultimately be of little use if it cannot land stably. That's why scientists at Harvard University designed their RoboBee with a pair of long mosquito-like legs, complete with joints.
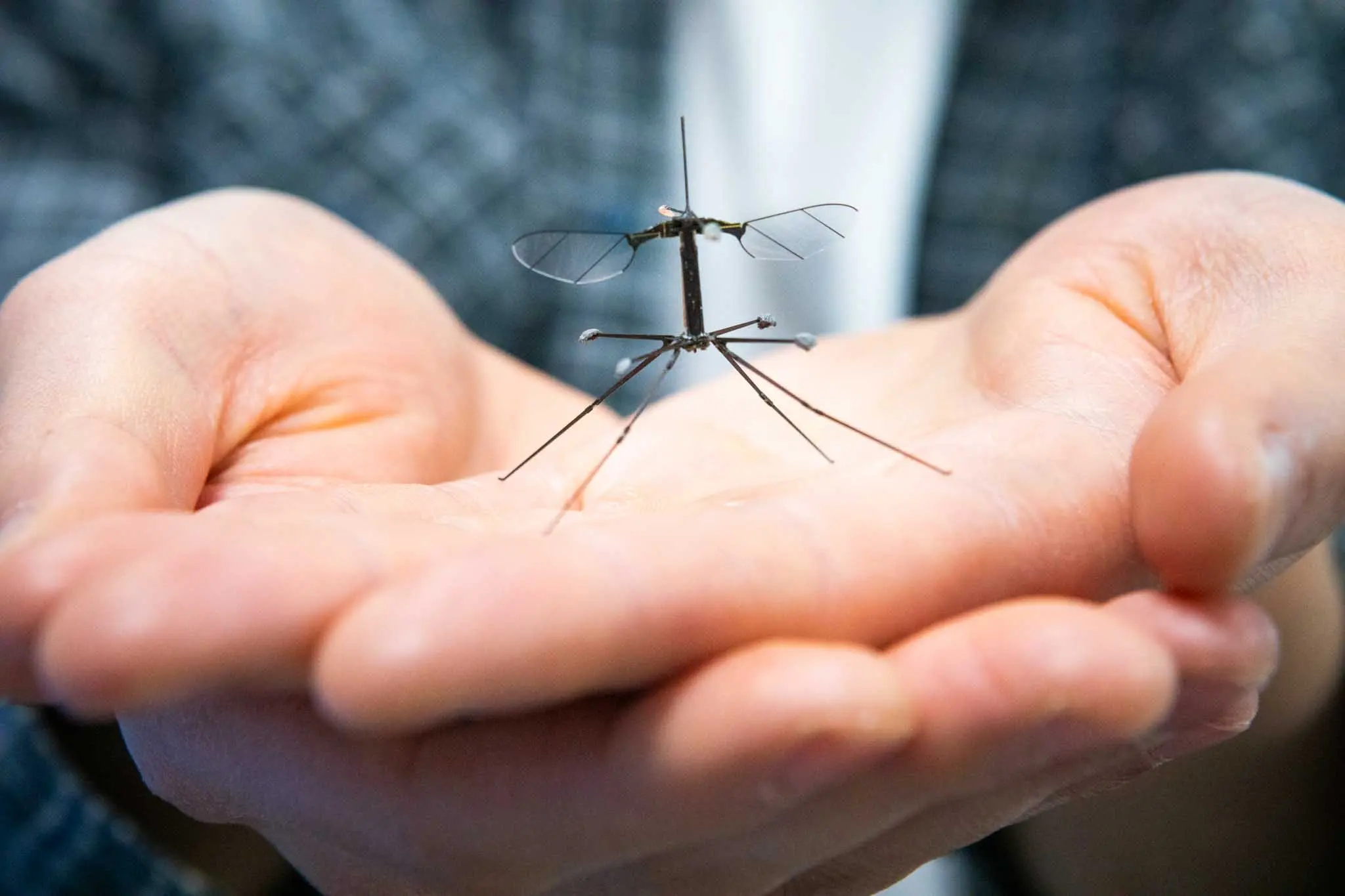
RoboBee has legs that mimic mosquitoes - future versions could be used in search and rescue operations, or for crop pollination
For those unfamiliar with RoboBee, it's a bee-inspired robot that flies by flapping a pair of tiny wings equipped with artificial muscles. It has a wingspan of less than 3 centimeters (1.2 inches) and weighs just a tenth of a gram... although it's connected to a power source and microprocessor via wires. That being said, future versions may eventually run completely independently. In fact, there is already a solar version.
While other versions of this little robot have proven capable of maneuvers like underwater flight and dangling stops, the base model has never performed well landing on flat (or other) surfaces. This is because the vortices created by its flapping wings can cause air turbulence when restrained by the ground, causing the robot to lose its balance.
“Previously, if we were landing, we would shut down the vehicle a little further from the ground, let it fall, and pray that it would land upright and safely,” said Christian Chan, an engineering graduate student who is leading the mechanical redesign of the robot.

Mosquitoes are known for their ability to land softly
RoboBee's four new legs, inspired by mosquito legs, are long and flexible enough that they can safely make contact with the ground before the robot's body is affected by ground-effect turbulence.
In addition, new control algorithms help guide the robot to land more smoothly, rather than letting it "just fall."

Multiple exposure of RoboBee taking off from one leaf and landing on another using its new legs
“Finding biological inspiration among the wide variety of insects provides us with countless ways to continue to improve robots,” said Alyssa Hernandez, a postdoctoral researcher and co-author of the research paper. "In turn, we can use these robotic platforms as tools for biological research, conducting studies that test biomechanical hypotheses."
The paper was recently published in the journal Science Robotics. In the video below, you can see the RoboBee mimic the landing motion of a crane fly.
Source: Harvard John A. Paulson School of Engineering and Applied Sciences