For some time now we've been hearing about "bistable" devices, which can maintain two states without consuming any energy. A bistable device is a tensioning device that is capable of switching between two stable states, but they do not require electricity to remain in either state. A new device inspired by plant seed pods takes the form of a robotic gripper that is both sturdy and easy to activate.
Metal hairpins are good examples of everyday objects that can grasp objects through contact. For these items, typically we don't want to apply a lot of pressure in order to trigger the grab hold action - this means wanting the grabber to have a low "energy barrier".
The problem is that bistable devices with low energy barriers often don't have enough power to grip the objects they grasp. In other words, they are likely to lose control of heavy objects or objects being pulled by external forces.
What we need is a grabber that has a low energy barrier when initially grabbing an object, but an increased energy barrier once the object is grasped. When it's time to release the object, the energy barrier is lowered again.
With this requirement in mind, a team of Chinese scientists studied the bistable seed pods of impatiens.

As long as the seeds in the pod are immature and unable to disperse, the pod maintains a high energy barrier, making it difficult to trigger. However, once the seeds mature, this energy barrier weakens. Therefore, even the pressure of raindrops is enough for the pods to shoot their seeds onto the surrounding soil.
Schematic diagram of bionic bistable gripper
Dr. Yang Jinzhao from Sun Yat-sen University in China, Dr. Wu Jianing from Sun Yat-sen University, and Dr. Peng Haijun from Dalian University of Technology
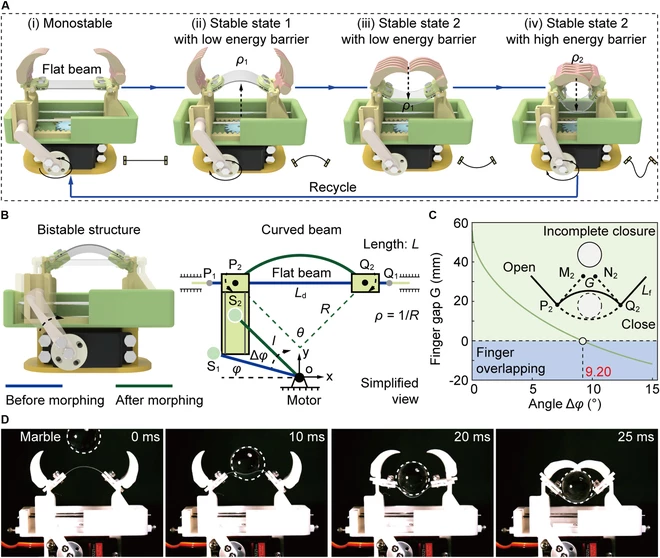
The gripper, inspired by impatiens pods, consists of two grasping "fingers" whose bases are connected to either end of a stretchy beam. The two clamps connecting the fingers to the beam are each connected to a rotating shaft driven by a motor.
In the holder's default neutral state, the beam is flat and free of tension. However, when an object needs to be grasped, the shaft rotates, causing the beam to bend slightly upward. This puts it in a bistable state under tension with a low energy barrier.
So when the gripper is placed around an object - and that object presses against an upward-curving beam - it causes the beam to spring into a downward-curving direction, while simultaneously pulling the finger toward the object.
Once this happens, the shaft rotates in the opposite direction, causing the beam to bend further downward. This increases its energy barrier, which strengthens and secures the gripper's grip on the item.
In a demonstration of the technology, one of the grippers was mounted on top of a quadcopter drone, allowing the drone to hang from tree branches, railings and other objects without hovering in place. While the beam motor consumes some power when adjusting beam tension, no power is required to maintain a grip on the object. This does not happen with traditional grippers.

Drones used in research
"Our robotic gripper has fast response speed, programmable interaction force, and simple and efficient design, opening up new avenues for next-generation robotic systems," said Dr. Jianing Wu of Sun Yat-sen University. Dr. Wu co-led the project with Dr. Peng Haijun of Dalian University of Technology. "This unique mechanism can significantly expand the robot's capabilities, allowing it to be used in a variety of fields."
A paper on the research was recently published in the journal Research.